_Aerosense×Nileworksロゴ.jpg)
エアロセンスとナイルワークスが、データ駆動型の農業に関する業務提携
~広域対応ドローンによる撮影画像の利活用により、持続可能な農業の実現へ~
エアロセンス株式会社(本社:東京都文京区、代表取締役社長:佐部 浩太郎、以下「エアロセンス」)と株式会社ナイルワークス(本社:東京都千代田区、代表取締役社長:永田 幸生、以下「ナイルワークス」)は、エアロセンスの広域対応ドローンであるエアロボウイング[AS-VT01](以下「エアロボウイング」)を活用した
データ駆動型の農業の実現に向けて、戦略的業務提携をしました。
日本の農業は、就農者の高齢化や担い手不足が進み、病害虫や雑草の防除などの農作業の負担が課題となっています。そのため、各地の農業生産法人や、JA(農業協同組合)、農業・食品関連の企業、自治体でも、先端技術を活用した農業の取り組みが進み始めています。そこで両社は、エアロセンスによる、広域農場に適した長距離飛行可能なドローンと植生分析も可能なマルチスペクトルカメラによる撮像技術、及び、ナイルワークスが保有する作物の近接撮影と画像認識技術を組み合わせ、先端農業技術の向上をさらに進めます。データ駆動型の新しい農業の実現を加速させることにより、農業の人手不足解消や生産性向上を図り、持続可能な農業を目指します。
エアロボウイングによる広域飛行・撮影技術×ナイルワークス独自の解析技術
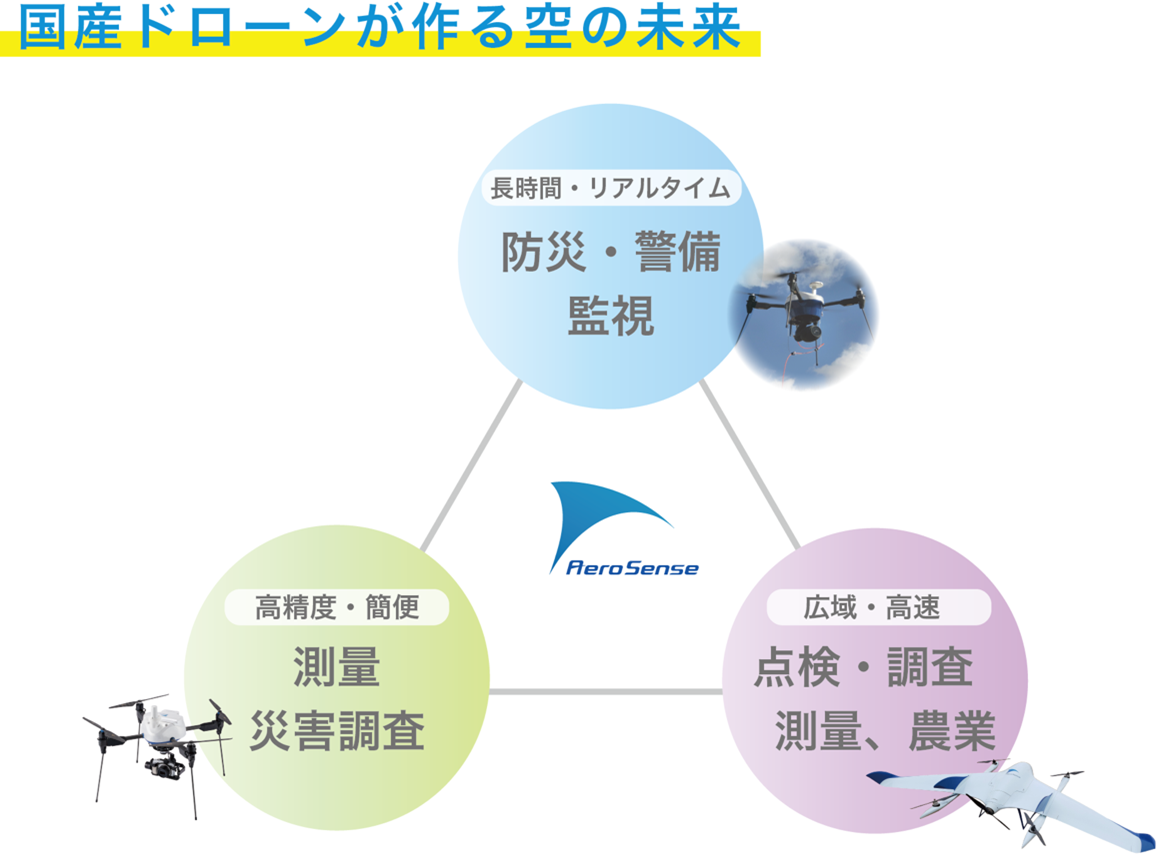
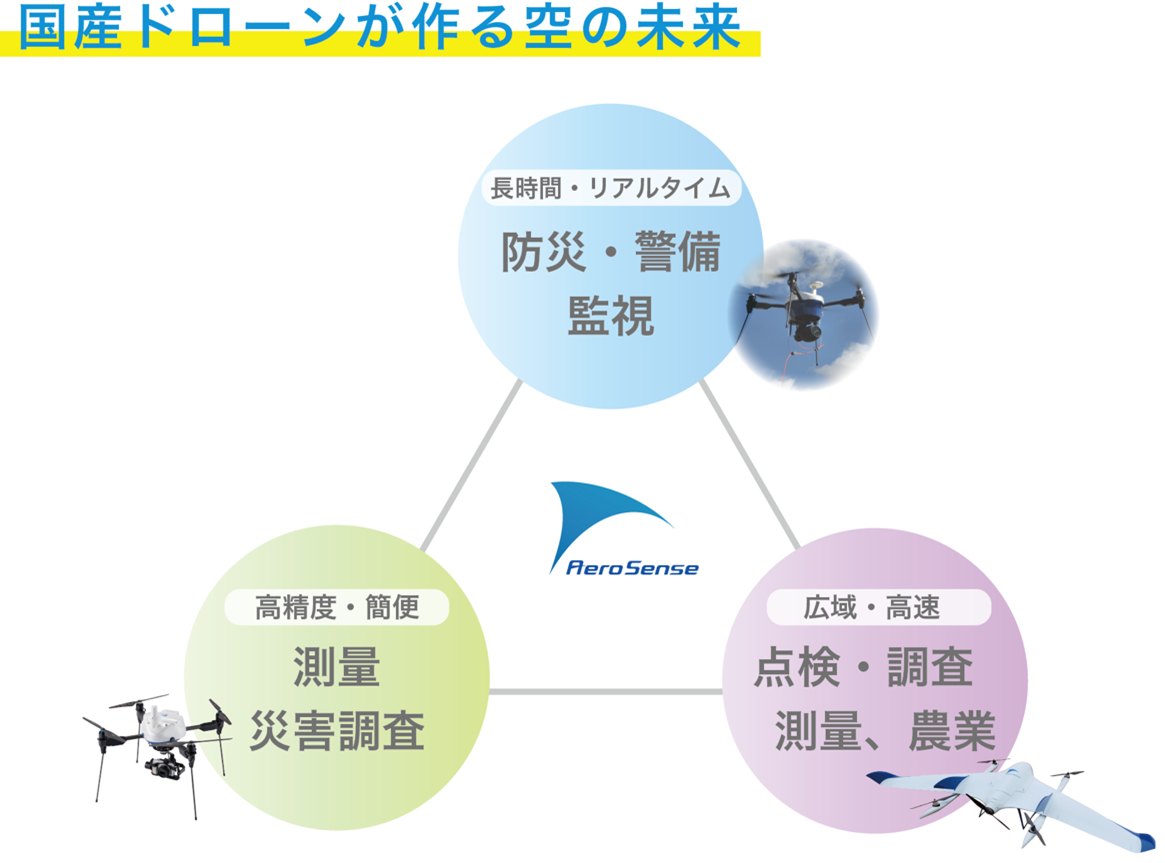
エアロボウイングは、エアロセンスで開発・設計・製造・販売を一貫して行っている垂直離陸型固定翼ドローン(VTOL)であり、一度で広範囲にわたる撮影が可能です。航続距離50kmの長距離飛行ができるため、広い農場での撮影を実現します。
エアロボウイングにはLTE通信機能を搭載しており、ドローン操作端末と本機の距離が離れても通信基地局を介して安定した飛行制御や映像伝送ができます。また、垂直離陸型という特性上、滑走路が不要なため、農場における狭い場所からの離着陸も可能です。撮影には、エアロボウイングに搭載したマルチスペクトルカメラ(MicaSense® ALTUM)を使用し、作物状態の分布を取得することができます。
図1 エアロセンスのエアロボウイングとその飛行の様子
ナイルワークスは、作物上空30~50㎝を自動飛行する「農業用ドローン」を2018年に上市して以来、全国延べ10,000ha以上の防除を行ってきました。このドローンに搭載した専用カメラにより、作物の近接画像を取得することで、次世代の営農支援システムの開発を行っています。

図2 ナイルワークスの農業用ドローンとその飛行の様子
両社は、それぞれの特長を活かし、農業におけるセンシングデータ利活用のソリューション開発を進めます。ナイルワークスで保有する水稲10,000haの高解像度・近接画像と、エアロボウイングで取得する中解像度・広域・スペクトル分布画像を突合させ、ナイルワークスが独自開発している画像認識の技術により、作物状態を解析します。その際、データをナイルワークスの農地データプラットフォーム「NileBank」に集約し、自動農機との連携や営農判断に利活用します。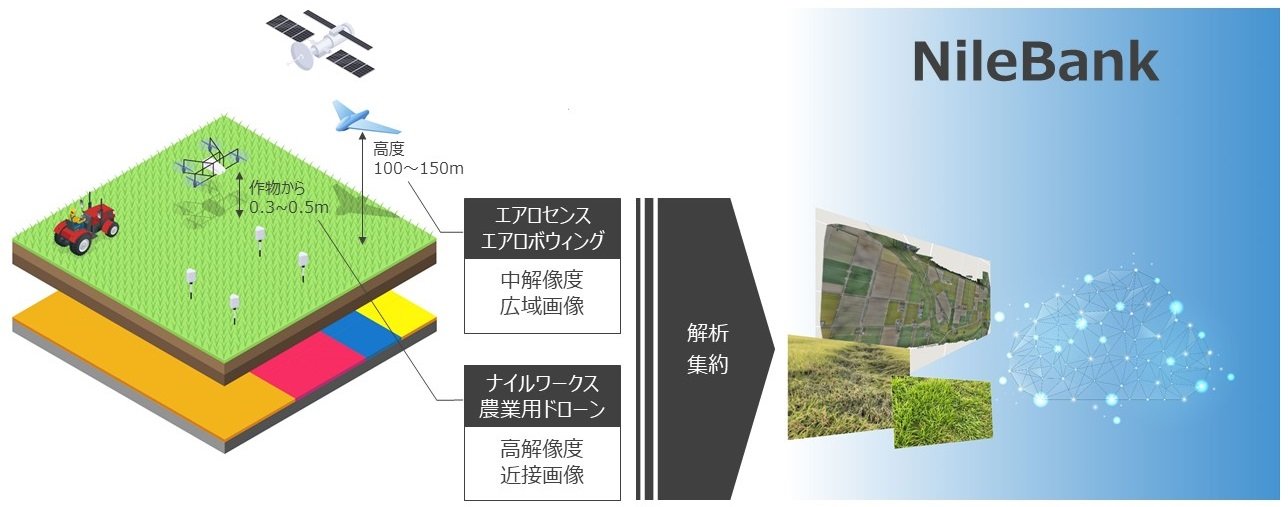
図3 エアロセンスとナイルワークスの提携による、農業におけるセンシングデータ利活用のソリューション開発のイメージ
2021年実施の実証実験
両社は、本業務提携に向けた基礎的な取り組みを既に実施しております。具体的には、北海道において、2021年8月にエアロボウイングを飛行させ、水稲圃場300ha程度のセンシングを30分程度で実現し、高度100~150mからの中解像度・広域画像を取得しました。また、同年10月には、牧草地のセンシング・解析を実施し、水稲以外の作物における実証実験も行いました。エアロセンスの画像解析クラウドソフト「エアロボクラウド」と連携し、ナイルワークスで解析を行っております。
今後、両社の協業分野を順次拡大していきます。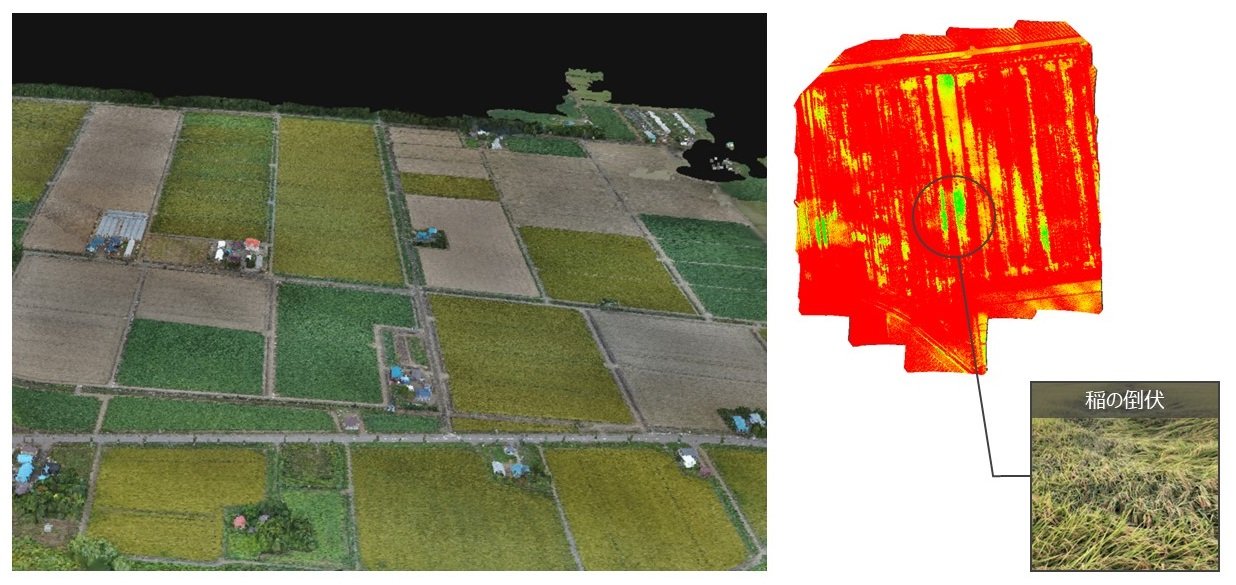
図4 水稲の作況、倒伏などの識別の取り組み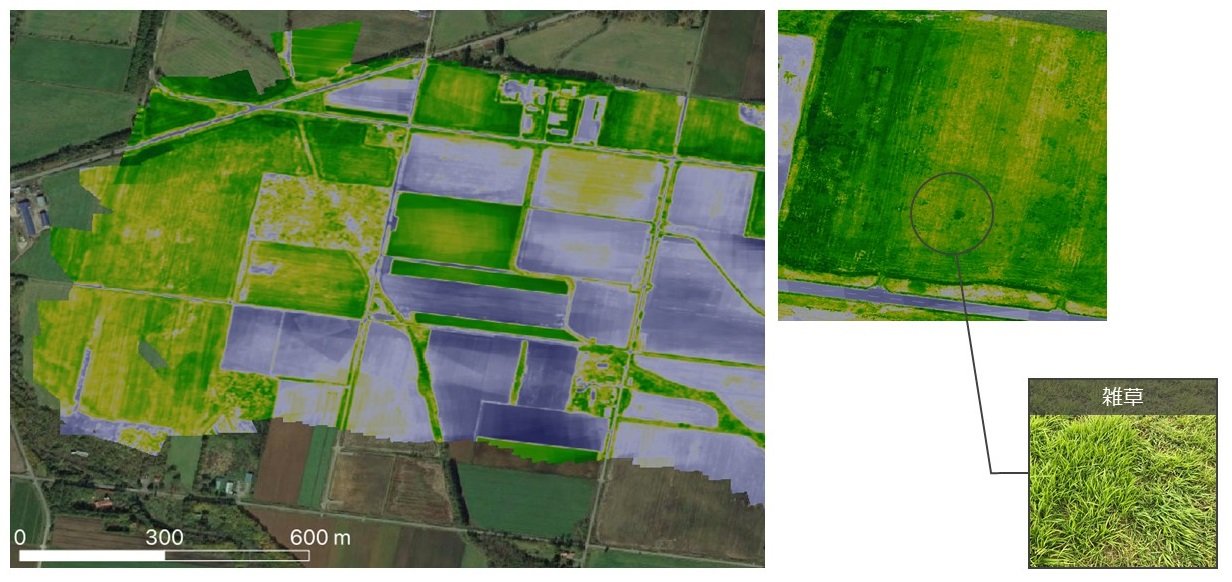
図5 牧草地における難防除雑草を抽出・解析する取り組み
データ駆動型の新しい農業の実現に向けた協業
両社は今回の提携により、エアロボウイングを活用した農業サービスの実用化に向け、様々な農業分野で実証実験と技術開発を重ねていきます。農業分野に適したエアロボウイングの機能開発・改良や、ナイルワークスが開発している画像認識の技術向上を図り、それらによりデータを活用した新しい農業サービスの実現を加速させます。両社が取り組むこのデータ駆動型農業は、農作業の効率化や省力化を実現します。日本の農業が抱える課題を解決することにより、自然と調和しながら、持続可能な農業を目指します。
図6 エアロセンスとナイルワークスの提携に際する両代表と両社のドローン、及び2021年の実証実験の様子
■会社概要
エアロセンス株式会社
設立: 2015年8月
所在地: 東京都文京区小石川五丁目41番10号 住友不動産小石川ビル
代表者: 代表取締役社長 佐部 浩太郎
事業内容: 自律型無人航空機の開発、製造、販売とサービス提供、自律型無人航空機によるセンシング等とクラウドによるデータ処理・管理、それらを組み合わせた建設、物流、点検・監視、農林水産、災害対応等の産業用分野におけるソリューション提供
URL: https://www.aerosense.co.jp
株式会社ナイルワークス
設立: 2015年1月
所在地: 東京都千代田区神田錦町一丁目4番3号
代表者: 代表取締役社長 永田 幸生
事業内容: 農業用ドローンの開発、製造、販売
デジタル農業・農業DXにおける技術開発、サービス提供、農機シェアリングのシステム開発、運用
URL: https://www.nileworks.co.jp
■参考映像
「空からの農場センシング エアロセンス×ナイルワークス」:https://youtu.be/ZUYSG571Oyg








 」
」
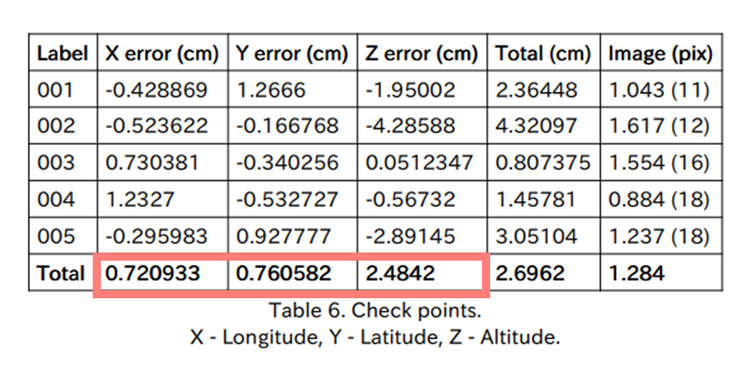
 後処理キネマティック測位により標定点の設置を削減できるため、人の立ち入りにくい場所や、高低差のある場所の測量に適しています。精度の高い地表3Dモデルの生成ができるため、災害発生後に被害を受けた道路などの調査にも活用が期待されています。
後処理キネマティック測位により標定点の設置を削減できるため、人の立ち入りにくい場所や、高低差のある場所の測量に適しています。精度の高い地表3Dモデルの生成ができるため、災害発生後に被害を受けた道路などの調査にも活用が期待されています。 エアロボウイング、エアロボPPK、エアロボで撮影した画像を解析できる画像解析処理クラウドソフト。ドローンで撮影した画像を合成し、地表モデルの作成を複雑な手順なしに行えます。後処理キネマティック測位にも対応しており、「エアロボウイング」や「エアロボPPK」で取得した高精度の後処理キネマティック情報とフォトグラメトリー処理※1を、複雑な操作なしに自動で連携できます。
エアロボウイング、エアロボPPK、エアロボで撮影した画像を解析できる画像解析処理クラウドソフト。ドローンで撮影した画像を合成し、地表モデルの作成を複雑な手順なしに行えます。後処理キネマティック測位にも対応しており、「エアロボウイング」や「エアロボPPK」で取得した高精度の後処理キネマティック情報とフォトグラメトリー処理※1を、複雑な操作なしに自動で連携できます。 光ファイバー経由で低遅延非圧縮4K映像をリアルタイム撮影できます。
光ファイバー経由で低遅延非圧縮4K映像をリアルタイム撮影できます。




 エアロボPPKは、2周波GNSS受信モジュールにより、GNSS衛星から発せられる2種類の電波の到着時間を比較し遅延量の差を読み取り、飛行中のドローン機体の位置と高さの正確な位置情報を算出します。
エアロボPPKは、2周波GNSS受信モジュールにより、GNSS衛星から発せられる2種類の電波の到着時間を比較し遅延量の差を読み取り、飛行中のドローン機体の位置と高さの正確な位置情報を算出します。 エアロボPPKは、ソニーのミラーレス一眼カメラを搭載しており、精細な画像撮影が可能です。カメラのシャッタータイミングにGNSS情報の受信を同期させるので、高精度な位置情報付きの画像データを取得できます。カメラには、メカシャッターを採用し、また高速なシャッタースピードに設定することにより、歪みの少ない画像が撮影できます。さらに、カメラの保持には3軸ジンバル機構を採用し、飛行中の揺れの影響を軽減させます。そのため、飛行中でも安定した質の高い画像を撮影できます。
エアロボPPKは、ソニーのミラーレス一眼カメラを搭載しており、精細な画像撮影が可能です。カメラのシャッタータイミングにGNSS情報の受信を同期させるので、高精度な位置情報付きの画像データを取得できます。カメラには、メカシャッターを採用し、また高速なシャッタースピードに設定することにより、歪みの少ない画像が撮影できます。さらに、カメラの保持には3軸ジンバル機構を採用し、飛行中の揺れの影響を軽減させます。そのため、飛行中でも安定した質の高い画像を撮影できます。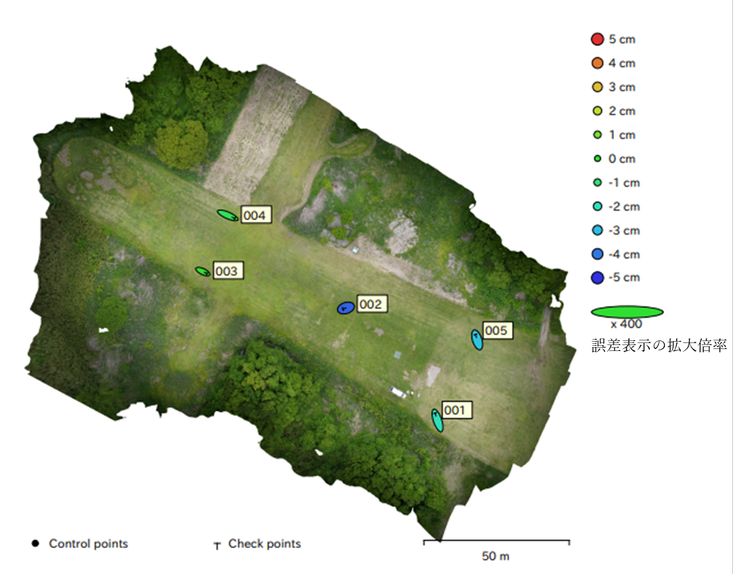

 写真測量データを高速処理できる画像解析クラウドソフト。「エアロボPPK」で取得した高精度の後処理キネマティック情報とフォトグラメトリー処理※8を、複雑な操作なしに自動で連携できます。地表3Dモデルなどを、高い品質の成果物として取得できます。
写真測量データを高速処理できる画像解析クラウドソフト。「エアロボPPK」で取得した高精度の後処理キネマティック情報とフォトグラメトリー処理※8を、複雑な操作なしに自動で連携できます。地表3Dモデルなどを、高い品質の成果物として取得できます。 GNSSロガーを搭載した高精度計測のドローン測量用対空標識。GNSS測位では最も精度の高い計測手法であるスタティック測位を採用しています。本機は、GNSSからマーカーの位置を自動計測しているため、トータルステーションからの観測は不要です。そのため、エアロボPPKの検証点として使用すると、さらなる生産性の向上につながります。取得した位置情報は、エアロボクラウドに簡単にアップロード可能です。
GNSSロガーを搭載した高精度計測のドローン測量用対空標識。GNSS測位では最も精度の高い計測手法であるスタティック測位を採用しています。本機は、GNSSからマーカーの位置を自動計測しているため、トータルステーションからの観測は不要です。そのため、エアロボPPKの検証点として使用すると、さらなる生産性の向上につながります。取得した位置情報は、エアロボクラウドに簡単にアップロード可能です。

